
BAB I
PENDAHULUAN
1.1
Latar Belakang
Mechatronics
adalah kata baru yang lahir di Jepang pada awal tahun 1970an yang merupakan
gabungan antara 2 kata yaitu mechanics dan electronics. Sekarang kita sering
melihat di sekeliling kita barang-barang mekatronik seperti robot, mesin bubut
NC, kamera dijital, printer dan lain sebagainya.
Persamaan dari barang-barang mekatronik ini adalah bahwa objek yang dikendalikan adalah gerakan mesin. Jika dibandingkan dengan gerakan mesin konvensional maka gerakan mesin tersebut lebih bersifat fleksibel dan lebih memiliki kecerdasan. Hal ini dimungkinkan karena memanfaatkan kemajuan iptek micro-electronics.
Yang berarti, dengan bantuan micro-electronics mesin dapat bergerak dengan lebih cerdas. Jika seseorang memberikan sebuah perintah, lalu semua dapat dipasrahkan ke mesin yang dapat bergerak secara otomatis. Ini sangat membantu menciptakan mesin atau alat yang praktis dan mudah digunakan. Sehingga sumber daya pada manusia seperti waktu dan otak dapat dipakai untuk pekerjaan yang lain untuk lebih menciptakan nilai tambah.
Persamaan dari barang-barang mekatronik ini adalah bahwa objek yang dikendalikan adalah gerakan mesin. Jika dibandingkan dengan gerakan mesin konvensional maka gerakan mesin tersebut lebih bersifat fleksibel dan lebih memiliki kecerdasan. Hal ini dimungkinkan karena memanfaatkan kemajuan iptek micro-electronics.
Yang berarti, dengan bantuan micro-electronics mesin dapat bergerak dengan lebih cerdas. Jika seseorang memberikan sebuah perintah, lalu semua dapat dipasrahkan ke mesin yang dapat bergerak secara otomatis. Ini sangat membantu menciptakan mesin atau alat yang praktis dan mudah digunakan. Sehingga sumber daya pada manusia seperti waktu dan otak dapat dipakai untuk pekerjaan yang lain untuk lebih menciptakan nilai tambah.
Latar
belakang lahirnya mekatronik dapat ditinjau dari dua sudut pandang, yaitu:
sudut pandang sumber daya atau bibit dan sudut pandang kebutuhan atau
permintaan.
Dari sudut pandang bibit sedikitnya ada 3 buah bibit yang mendorong lahirnya mekatronik yaitu:
(1) lahirnya device 4 bit pada tahun 1971 yang berkembang dengan pesat menjadi mikro-prosesor yang memiliki kemampuan yang semakin tinggi dan harga yang semakin rendah, (2) lahirnya motor listrik ukuran kecil yang memiliki torsi besar yang menggunakan permanen magnet rear-earth yang merupakan hasil sampingan program litbang luar angkasa NASA, dan (3) hasil-hasil teori kendali dijital.
Dari sudut pandang kebutuhan sedikitnya ada 2 buah tarikan kebutuhan yaitu:
(1) pada awal lahirnya mekatronik terdapat tarikan kebutuhan dari konsumen terhadap adanya sistem produksi yang mampu menjawab kebutuhan dengan tipe yang beraneka ragam dalam jumlah yang sedikit - sedikit, dan
(2) tarikan kebutuhan akan barang-barang atau alat-alat pemroses informasi yang memiliki kecepatan tinggi dengan dimensi kecil untuk menjawab berkembangan masyarakat informasi yaitu masyarakat dimana peranan informasi menjadi semakin penting.
Dari sudut pandang bibit sedikitnya ada 3 buah bibit yang mendorong lahirnya mekatronik yaitu:
(1) lahirnya device 4 bit pada tahun 1971 yang berkembang dengan pesat menjadi mikro-prosesor yang memiliki kemampuan yang semakin tinggi dan harga yang semakin rendah, (2) lahirnya motor listrik ukuran kecil yang memiliki torsi besar yang menggunakan permanen magnet rear-earth yang merupakan hasil sampingan program litbang luar angkasa NASA, dan (3) hasil-hasil teori kendali dijital.
Dari sudut pandang kebutuhan sedikitnya ada 2 buah tarikan kebutuhan yaitu:
(1) pada awal lahirnya mekatronik terdapat tarikan kebutuhan dari konsumen terhadap adanya sistem produksi yang mampu menjawab kebutuhan dengan tipe yang beraneka ragam dalam jumlah yang sedikit - sedikit, dan
(2) tarikan kebutuhan akan barang-barang atau alat-alat pemroses informasi yang memiliki kecepatan tinggi dengan dimensi kecil untuk menjawab berkembangan masyarakat informasi yaitu masyarakat dimana peranan informasi menjadi semakin penting.
2.1
Batasan Masalah
Untuk menentukan arah pembuatan project
yang baik, ditentukan batasan masalah sebagai berikut:
1.2.1
Project ini
didasarkan pada sistem kendali jembatan.
1.2.2
Input
menggunakan sensor ultrasonik HC-SR04.
1.2.3
Output
menggunakan servo untuk membuka jembatan.
1.2.4
Display jarak
bisa dilihat pada LCD 16x2 dengan tambahan LED untuk rambu - rambu lalu lintas.
1.3
Tujuan
Adapun tujuan pembuatan
project adalah:
1.3.1
Mengerti sistem
kendali pada jembatan.
1.3.2
Mengetahui dan
memahami program arduino untuk sistem kendal jembatan.
1.3.3
Mengerti
instalasi pemasangan sistem dari arduino ke akuator dan komponen – komponen
lainnya.
BAB II
LANDASAN TEORI
2.1
Gambaran Umum Sistem
Dari
mini project yang kami buat yaitu sistem kendali pada jembatan dimana ketika
kapal laut pada jarak 10 cm dari sensor ultrasonik HC-SR04 maka servo akan
bergerak pada posisi nol derajat seolah – olah jembatan menganggat supaya kala
laut bisa lewat dengan aman.
2.2
Komponen
2.2.1
Arduino UNO
Arduino adalah sebuah papan
(board) rangkaian elektronik yang
terdiri dari perangkat keras (hardware)
dan perangkat lunak (software) yang
bersifat open source. Perangkat
lunaknya bersifat open source dimana source code Arduino dapat disesuaikan
dan dikembangkan dengan kebutuhan perograman para penggunanya.
Bentuk
dari board Arduino dapat dilihat pada
Gambar Komponen Arduino berikut ini :

Gambar 2.1.1
: Komponen Arduino
2.1.1
HC SR04
Sensor HC-SR04 adalah sensor pengukur jarak berbasis
gelombang ultrasonik. Prinsip kerja sesnsor ini pirip dengan radar ultrasonik.
Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver
ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari
jarak objek. Sensor ini cocok untuk aplikasi elektronik yang memerlukan deteksi
jarak termasuk untuk sensor pada robot.
Sensor HC-SR04 adalah versi low cost dari sensor
ultrasonic PING buatan parallax. Perbedaaannya terletak pada pin yang
digunakan. HC-SR04 menggunakan 4 pin sedangkan PING buatan parallax menggunakan
3 pin. Pada Sensor HC-SR04 pin trigger dan output diletakkan terpisah.
Sedangkan jika menggunakan PING dari Parallax pin trigger dan output telah
diset default menjadi satu jalur. Tidak ada perbedaaan signifikan dalam
pengimplementasiannya. Jangkauan karak sensor lebih jauh dari PING buatan
parllax, dimana jika ping buatan parllax hanya mempunyai jarak jangkauan
maksimal 350 cm sedangkan sensor HC-SR04 mempunyai kisaran jangkauan maksimal
400 - 500cm.
Spesifikasi:
·
Jangkauan deteksi: 2cm
sampai kisaran 400 -500 cm.
·
Sudut deteksi terbaik
adalah 15 derajat.
·
Tegangan kerja 5V DC.
·
Resolusi 1cm.
·
Frekuensi Ultrasonik 40
kHz.
·
Dapat dihubungkan
langsung ke kaki mikrokontroler.

Gambar 2.1.1 : Sistem Kerja Sensor
Jarak
2.1.2
LCD 16 x 2
LCD (Liquid
Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai
penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat
elektronik seperti televisi, kalkulator, atau pun layar komputer. Pada
postingan aplikasi LCD yang dugunakan ialah LCD dot matrik dengan jumlah
karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan
digunakan untuk menampilkan status kerja alat.
Adapun fitur yang disajikan dalam
LCD ini adalah :
·
Terdiri dari 16 karakter dan 2 baris.
·
Mempunyai 192 karakter tersimpan.
·
Terdapat karakter generator terprogram.
·
Dapat dialamati dengan mode 4-bit dan 8-bit.
·
Dilengkapi dengan back light.

Gambar
2.1.2.1 : Bentuk Fisik LCD 16 x 2
Spesifikasi
LCD dapat dilihat pada tabel dibawah ini :

Cara Kerja LCD Secara Umum
Pada
aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit atau
8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7.
Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah
parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan
dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang
8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu. Jika mode 4-bit
yang digunakan, maka 2 nibble data dikirim untuk membuat sepenuhnya 8-bit
(pertama dikirim 4-bit MSB lalu 4-bit LSB dengan pulsa clock EN setiap
nibblenya). Jalur kontrol EN digunakan untuk memberitahu LCD bahwa
mikrokontroller mengirimkan data ke LCD. Untuk mengirim data ke LCD program
harus menset EN ke kondisi high “1” dan kemudian menset dua jalur kontrol
lainnya (RS dan R/W) atau juga mengirimkan data ke jalur data bus.
Saat jalur
lainnya sudah siap, EN harus diset ke “0” dan tunggu beberapa saat (tergantung
pada datasheet LCD), dan set EN kembali ke high “1”. Ketika jalur RS berada
dalam kondisi low “0”, data yang dikirimkan ke LCD dianggap sebagai sebuah
perintah atau instruksi khusus (seperti bersihkan layar, posisi kursor dll).
Ketika RS dalam kondisi high atau “1”, data yang dikirimkan adalah data ASCII
yang akan ditampilkan dilayar. Misal, untuk menampilkan huruf “A” pada layar
maka RS harus diset ke “1”. Jalur kontrol R/W harus berada dalam kondisi low
(0) saat informasi pada data bus akan dituliskan ke LCD. Apabila R/W berada
dalam kondisi high “1”, maka program akan melakukan query (pembacaan) data dari
LCD. Instruksi pembacaan hanya satu, yaitu Get LCD status (membaca status LCD),
lainnya merupakan instruksi penulisan. Jadi hampir setiap aplikasi yang
menggunakan LCD, R/W selalu diset ke “0”. Jalur data dapat terdiri 4 atau 8
jalur (tergantung mode yang dipilih pengguna), DB0, DB1, DB2, DB3, DB4, DB5,
DB6 dan DB7. Mengirim data secara parallel baik 4-bit atau 8-bit merupakan 2
mode operasi primer. Untuk membuat sebuah aplikasi interface LCD, menentukan
mode operasi merupakan hal yang paling penting.
Mode 8-bit
sangat baik digunakan ketika kecepatan menjadi keutamaan dalam sebuah aplikasi
dan setidaknya minimal tersedia 11 pin I/O (3 pin untuk kontrol, 8 pin untuk
data). Sedangkan mode 4 bit minimal hanya membutuhkan 7-bit (3 pin untuk
kontrol, 4 pin untuk data). Bit RS digunakan untuk memilih apakah data atau
instruksi yang akan ditransfer antara mikrokontroller dan LCD. Jika bit ini di
set (RS = 1), maka byte pada posisi kursor LCD saat itu dapat dibaca atau
ditulis. Jika bit ini di reset (RS = 0), merupakan instruksi yang dikirim ke
LCD atau status eksekusi dari instruksi terakhir yang dibaca. untuk gambar
skematik LCD 16x2 adalah sebagai berikut:
{kind=link}

Gambar
2.1.2.3 : Skematik LCD
2.1.3
SERVO
Motor servo adalah sebuah perangkat atau aktuator
putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup
(servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan
posisi sudut dari poros output motor. motor servo merupakan perangkat yang
terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer.
Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran
poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan
perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas
posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor
servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo.
Penjelasan sederhananya begini, posisi poros output akan di sensor untuk
mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan
jika belum, maka kontrol input akan mengirim sinyal kendali untuk membuat
posisi poros tersebut tepat pada posisi yang diinginkan. Untuk lebih jelasnya
mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa
aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada
AC, kulkas, setrika dan lain sebagainya. Motor servo biasa digunakan dalam
aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai
aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain
sebagainya.

{kind=link}
Gambar 2.1.3.1 :
Servo Standard
{kind=link}
Gambar 2.1.3.2 :
Komponen Servo Standard
Ada dua jenis motor servo, yaitu motor
servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau
beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan
motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang
lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis
motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo
rotation continuous.
·
Motor servo
standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo,
dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan
dan 90⁰
kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau
180⁰.
·
Motor servo
rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan
jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan
kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
Motor servo dikendalikan dengan memberikan sinyal
modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar
pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari
poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik)
akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan
berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam),
sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor
servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya
perhatikan gambar dibawah ini.
{kind=link}
Gambar 2.1.3.3 :
Grafik Alur Servo
Ketika lebar
pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau
berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut
dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang
mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba
menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating
torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk
selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik)
untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada
posisinya.
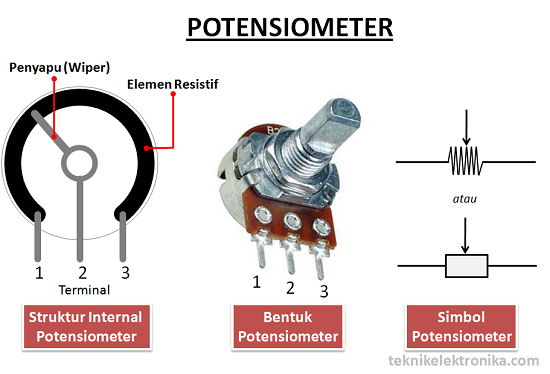
2.1.4
POTENSIOMETER
Potensiometer
(POT) adalah salah satu jenis Resistor yang Nilai Resistansinya dapat diatur
sesuai dengan kebutuhan Rangkaian Elektronika ataupun kebutuhan pemakainya.
Potensiometer merupakan Keluarga Resistor yang tergolong dalam Kategori
Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki Terminal
dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar
dibawah ini menunjukan Struktur Internal Potensiometer beserta bentuk dan
Simbolnya.
{kind=link}
Fungsi-fungsi Potensiometer
Dengan kemampuan yang dapat mengubah resistansi atau hambatan,
Potensiometer sering digunakan dalam rangkaian atau peralatan Elektronika
dengan fungsi-fungsi sebagai berikut :
1. Sebagai
pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape
Mobil, DVD Player.
2. Sebagai
Pengatur Tegangan pada Rangkaian Power Supply.
3. Sebagai
Pembagi Tegangan.
4. Aplikasi
Switch TRIAC.
5. Digunakan
sebagai Joystick pada Tranduser.
6. Sebagai
Pengendali Level Sinyal.
2.1.5
Breadboard
Project Board atau yang sering
disebut sebagai BreadBoard adalah dasar konstruksi sebuah sirkuit elektronik
dan merupakan prototipe dari suatu rangkaian elektronik. Di zaman modern
istilah ini sering digunakan untuk merujuk pada jenis tertentu dari papan
tempat merangkai komponen, dimana papan ini tidak memerlukan proses menyolder (
langsung tancap ).
Gambar 2.1.5.1 : Project Board
Karena papan ini solderless alias
tidak memerlukan solder sehingga dapat digunakan kembali, dan dengan demikian
dapat digunakan untuk prototipe sementara serta membantu dalam bereksperimen
desain sirkuit elektronika. Berbagai sistem elektronik dapat di prototipekan
dengan menggunakan breadboard, mulai dari sirkuit analog dan digital kecil
sampai membuat unit pengolahan terpusat (CPU). Secara
umum breadbord memiliki jalur seperti berikut ini :
{kind=link}
Gambar 2.1.5.2 : Alur Arus
Breadboard
Penjelasan :
·
Pasang jalur Atas dan bawah terhubung secara
horisontal sampai ke bagian tengah dari breadboard. Biasanya jalur ini
digunakan sebagai jalur power atau jalur sinyal yg umum digunakan seperti clock
atau jalur komunikasi.
·
5 lobang komponen di tengah merupakan tempat merangkai
komponen. Jalur ke 5 lobang ini terhubung vertikal sampai bagian tengah dari
breadboard.
·
Pembatas tengah breadboard biasanya digunakan sebagai
tempat menancapkan komponen IC.
2.1.6
Resistor
Resistor adalah komponen
elektronika yang
memang didesain memiliki dua kutup yang nantinya dapat digunakan untuk menahan
arus listrik apabila di aliri tegangan listrik antara kedua kutub tersebut. Resistor biasanya banyak digunakan
sebagai bagian dari sirkuit elektronik. Tak cuma itu, komponen yang satu ini
juga yang paling sering digunakan di antara komponen lainnya. Resistor adalah
komponen yang terbuat dari bahan isolator yang didalamnya mengandung nilai
tertentu sesuai dengan nilai hambatan yang diinginkan. Berdasarkan hukum Ohm,
nilai tegangan terhadap resistansi berbanding dengan arus yang mengalir :
{kind=link}
Bentuk dari resistor sendiri saat ini ada bermacam-macam. Yang paling
umum dan sering di temukan di pasaran adalah berbentuk bulat panjang dan
terdapat beberapa lingkaran warna pada body resistor. Ada 4 lingkaran yang ada
pada body resistor. Lingkaran warna tersebut berfungsi untuk menunjukan nilai
hambatan dari resistor.
{kind=link}
Gambar 2.1.6.1 : Resistor
Karakteristik utama resistor adalah resistansinya dan daya listrik yang
dapat dihantarkan. Sementara itu, karakteristik lainnya adalah koefisien suhu,
derau listrik (noise) dan induktansi. Resistor juga dapat kita integrasikan
kedalam sirkuit hibrida dan papan sirkuit, bahkan bisa juga menggunakan sirkuit
terpadu. Ukuran dan letak kaki resistor tergantung pada desain sirkuit itu
sendiri, daya resistor yang dihasilkan juga harus sesuai dengan kebutuhan agar
rangkaian tidak terbakar.
Kode Warna Resistor pertama kali
ditemukan pada tahun 1920 yang kemudian dikembangkan oleh perkumpulan
pabrik radio di Eropa dan Amerika RMA (Radio Manufacturers Association). Pada
era 1957, kelompok ini sepakat untuk berganti nama menjadi EIA (Electronic
Industries Alliance) dan menetapkan kode tersebut sebagai standar EIA-RS-279.
Dalam aturan standar EIA-RS-279, telah ditetapkan 3 sistem kode warna, yaitu :
·
Sistem Kode Warna 4 Pita.
·
Sistem Kode Warna 5 Pita.
·
Sistem Kode Warna 6 Pita.
{kind=link}
Gambar 2.1.6.2 :Kode Warna Resistor
{kind=link}
Gambar 2.1.6.3 : Sistem Kode Warna 4
Pita
Sistem ini merupakan kode warna paling sering digunakan yang terdiri dari
4 pita warna yang mengelilingin badan resistor. Dua pita yang terdapat pada
bagian depan merupakan informasi dua digit harga resistansi, sedangkan pita
ketiga merupakan faktor pengali (jumlah nol yang ditambahkan setelah dua digit
resistansi) dan pita keempat merupakan toleransi harga resistansi. Kadang di
dalam resistor terdapat pita kelima yang berfungsi untuk menunjukan koefisien
suhu, tetapi ini juga tergantung dari sistem lima warna sejati yang menggunakan
tiga digit resistansi.
{kind=link}
Contoh :
Pita ke-1 = Hijau, Pita ke-2 = Biru, Pita ke-3 = Perak, Pita ke-4 = Emas.
Nilainya adalah 0,56 Ω, dengan Toleransi 5%.
Pita ke-1 = Hijau, Pita ke-2 = Biru, Pita ke-3 = Perak, Pita ke-4 = Emas.
Nilainya adalah 0,56 Ω, dengan Toleransi 5%.
{kind=link}
Gambar 2.1.6.4 : Sistem Kode Warna 5
Pita
Sistem kode warna ini banyak digunakan pada resistor presisi. Tiga pita
pertama menunjukan harga resistansi, sedangkan pita keempat adalah pengali dan
pita kelima adalah toleransi. Pada resistor yang memiliki 5 kode warna dengan
pita keempat yang berwarna emas atau perak kadang di abaikan, karena hanya
digunakan pada resistor lawas atau penggunaan khusus. Pita keempat adalah
toleransi dan yang kelima adalah koefisien.
Contoh :
Pita ke-1 = Hijau, Pita ke-2 = Hitam, Pita ke-3 = Hitam, Pita ke-4 = Perak. Pita ke-5 = Coklat.
Nilainya adalah 5 Ω, dengan Toleransi 1%.
Pita ke-1 = Hijau, Pita ke-2 = Hitam, Pita ke-3 = Hitam, Pita ke-4 = Perak. Pita ke-5 = Coklat.
Nilainya adalah 5 Ω, dengan Toleransi 1%.
{kind=link}
Gambar 2.1.6.5 : Sistem Kode Warna 6
Pita
Sistem kode warna satu ini terdapat 6 pita, dimana 3 pita pertama
menunjukan nilai tahanan, pita keempat menunjukan perkalian desimal, pita
kelima menunjukan nilai toleransi dan pita keenam menunjukan koefisien suhu.
{kind=link}
Contoh :
Pita ke-1 = Hijau, Pita ke-2 = Biru, Pita ke-3 = Hijau, Pita ke-4 = Emas. Pita ke-5 = Coklat.
Pita ke-6 = Coklat.
Nilainya adalah 56,6 Ω, Toleransi 1%, Koefisien suhu 100 ppm / ºC
Pita ke-1 = Hijau, Pita ke-2 = Biru, Pita ke-3 = Hijau, Pita ke-4 = Emas. Pita ke-5 = Coklat.
Pita ke-6 = Coklat.
Nilainya adalah 56,6 Ω, Toleransi 1%, Koefisien suhu 100 ppm / ºC
2.1.7
LED (Light
Emitting Diode)
Light Emitting Diode atau sering disingkat
dengan LED adalah komponen elektronika yang dapat memancarkan cahaya
monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang
terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED
tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat
memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering
kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik
lainnya.
Bentuk LED mirip dengan sebuah
bohlam (bola lampu) yang kecil dan dapat dipasangkan dengan mudah ke dalam
berbagai perangkat elektronika. Berbeda dengan Lampu Pijar, LED tidak
memerlukan pembakaran filamen sehingga tidak menimbulkan panas dalam
menghasilkan cahaya. Oleh karena itu, saat ini LED (Light Emitting Diode)
yang bentuknya kecil telah banyak digunakan sebagai lampu penerang dalam LCD TV
yang mengganti lampu tube. Simbol dan Bentuk LED (Light
Emitting Diode)
BAB III
METODE
3.1
Prosedur Pembuatan Project
Prosedur mini project
ini dilakukan sebagai acuan memulai pembuatan project
Start
|
Pengumpulan
Data
|
Persiapan
|
Pembuatan
Miniatur
|
Program
|
Uji
|
Selesai
|
No
|
OK
|
Bagan 3.1: Alur Pembuatan Project
3.2
Pembagian Tugas
Dari
mini project yang kami buat maka kelompok kami yang beranggotakan 6 orang
dibagi menjadi 3 divisi.
Divisi
Design : Hilman Mubarok
Haris
Munandar
Devisi Program :
Yusup Junaedi
Devisi Perakitan :
Fatkhul Muin
Kaulum Ma’ruf
Nur Arifin
Tugas
dari devisi – devisi :
Devisi
|
Tugas
|
Devisi Design
|
Dari devisi ini bertugas untuk
menyusun desain dan sistem dari mini project yang kami buat
|
Devisi Program
|
Bertugas untuk menyusun program
arduino dan sistem instalasi kabel yang akan dipasang.
|
Devisi Perakitan
|
Bertugas untuk merakit miniatur
yang sudah di desain atau diarahkan oleh devisi design.
|
BAB IV
PEMBAHASAN
4.1
Instalasi Sistem
Dari instalasi
miniatur sistem kendali jembatan yang kami buat maka sistem instalasi dapat
dilihat pada gambar 4.1 dibawah dengan beberapa komponen seperti arduino,
breadboard, servo, sensor jarak, LCD, potensiometer, resistor dan LED.
Gambar 4.1 : Sistem Instalasi Sistem
Kendali Jembatan
Dapat
dilihat pada gambar bahwa servo memiliki 3 kabel, kabel hitam/coklat dihubungkan
dengan GND, kabel merah dihubungkan dengan 5V dan kabel kuning dihubungkan
dengan arduino pin 9. Pada sensor jarak memiliki 4 slot kabel, slot VCC
dihubungkan dengan dengan 5V, slot GND dihubungkan dengan GND, slot trig
dihubungkan dengan arduino pin 7, slot echo dihubungkan dengan arduino pin 6.
Pada
LED merah memiliki 2 kaki, kaki yang lebih pendek dihubungkan dengan GND,
sedangkan kaki yang lebih panjang dihubungkan dengan salah satu kaki resistor
yang sudah dihubungkan dengan board, kaki resistor yang kosong dihubungkan
dengan arduino pin 8. Sama halnya dengan LED merah, LED hijaupun memiliki
instalasi yang sama tetapi LED hijau dihubungkan dengan arduino pin 10.
Pada
LCD ada 16 pin atau slot dimana kita hanya memakai 12 slot yang ada, pada slot
ke 1 dihubungkan dengan GND, slot ke 2 dihubungkan dengan 5V, slot ke 3
dihubungkan dengan slot tengah potensiometer yang sebelumnya kaki samping kiri
potensiometer dihubungkan dengan 5V dan kaki kanan dihubukan dengan GND, slot
ke 4 dihubungkan dengan arduino pin 12, slot ke 5 dihubungkan dengan GND, slot
ke 6 dihubungkan dengan arduino pin 11, dari slot 11 – 14 dihubungkan dengan
arduino dari pin 5 – 2, slot ke 15 dihubungkan dengan salah satu kaki resistor
yang sebelumnya sudah dipasang pada board yang salah satu kakinya digabungkan
dengan 5V, dan slot ke 16 dihubungkan dengan GND.
4.2
Program Arduino
Dari project
sistem kendali jembatan yang kami buat maka disusunlah program arduino untuk
mengendalikan komponen – komponen yang ada.
#include
<LiquidCrystal.h>
#include
<NewPing.h> //Library untuk Sensor Ultrasonic
#include
<Servo.h> //Library untuk Servo
#define trigPin 7 //Set
Trigger HCSR04 di Pin digital 7
#define echoPin 6 //Set
Echo HCSR04 di Pin digital 6
#define MAX_DISTANCE
500 //Set jarak maksimal
NewPing sonar(trigPin,
echoPin, MAX_DISTANCE);
int LEDhijau = 10,
LEDmerah = 8; //Set Pin LED hijau dan LED merah
Servo myservo; //Buat
object 1 buah motor servo
LiquidCrystal lcd(12,
11, 5, 4, 3, 2);
int pingPin = 7; //output
10us pulse to this pin
int inPin = 6;
//measure return pulse width from this pin
long duration, inches,
cm;
int indec, cmdec;
int inchconv = 147; //
ratio between puls width and inches
int cmconv = 59; //
ratio between pulse width and cm
String s1, s2;
// initialise LCD
library and pins
void setup() {
lcd.begin(16, 2);
pinMode(pingPin, OUTPUT);
pinMode(inPin, INPUT);
Serial.begin (115200); //Kecepatan komunikasi
serial
pinMode(trigPin, OUTPUT); //Set pin Trigger
sebagai output
pinMode(echoPin, INPUT); //Set pin Echo
sebagai input
pinMode(LEDmerah, OUTPUT); //Set LEDmerah
sebagai output
pinMode(LEDhijau, OUTPUT); //Set LEDhijau
sebagai output
myservo.attach(9); //Set servo pada pin PWM 9
}
void loop()
{
// Send a short LOW followed by HIGH pulse to
Trigger input:
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(10);
digitalWrite(pingPin, LOW);
// read the length of the return pulse on
Echo output
duration = pulseIn(inPin, HIGH);
// convert the time into a distance
(non-floating point with decimals
inches = microsecondsToInches(duration);
indec = (duration - inches * inchconv) * 10 /
inchconv;
cm = microsecondsToCentimeters(duration);
cmdec = (duration - cm * cmconv) * 10 /
cmconv;
s1 = String(inches) + "." +
String(indec) + "in" + "
";
s2 = String(cm) + "." +
String(cmdec) + "cm" + "
";
lcd.setCursor(0, 0); // print inches on top
line of LCD
lcd.print(s1);
lcd.setCursor(0,1); // print cm on second
line of LCD
lcd.print(s2);
delay(100);
int duration, jarak,posisi=0,i;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(100);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
jarak = (duration/2) / 29.1;
Serial.print(jarak);
Serial.println(" cm");
if(jarak<=10) //
Jarak (Cm) dapat anda sesuaikan
{
digitalWrite(LEDhijau, HIGH); //LEDhijau
hidup
digitalWrite(LEDmerah, LOW); //LEDmerah mati
myservo.write(0); //Posisi servo pada 0
derajat
delay(6000); //Delay
}
if (jarak>=10){ //Jika jarak lebih dari
yang ditentukan
digitalWrite(LEDmerah, HIGH); //LEDmerah
hidup
digitalWrite(LEDhijau, LOW); //LEDhijau mati
myservo.write(90); //Posisi servo pada 90
derajat
}
}
long
microsecondsToInches(long microseconds)
{
return microseconds / inchconv;
}
long
microsecondsToCentimeters(long microseconds)
{
return microseconds / cmconv;
}
BAB
V
PENUTUP
5.1
Kesimpulan
Dari project
yang kami jalankan maka sistem yang dijalankan ketika sensor jarak mendeteksi
benda pada jarak kurang dari 10 cm maka servo akan bergerak dengan delay 6
detik.
DAFTAR PUSTAKA
LAMPIRAN 1
LAMPIRAN 2
Tidak ada komentar:
Posting Komentar